Cosa hanno in comune un pendolo, una molla e la proiezione di corpo che si muove di moto circolare uniforme? Che effettuano tutti e tre moti armonici.
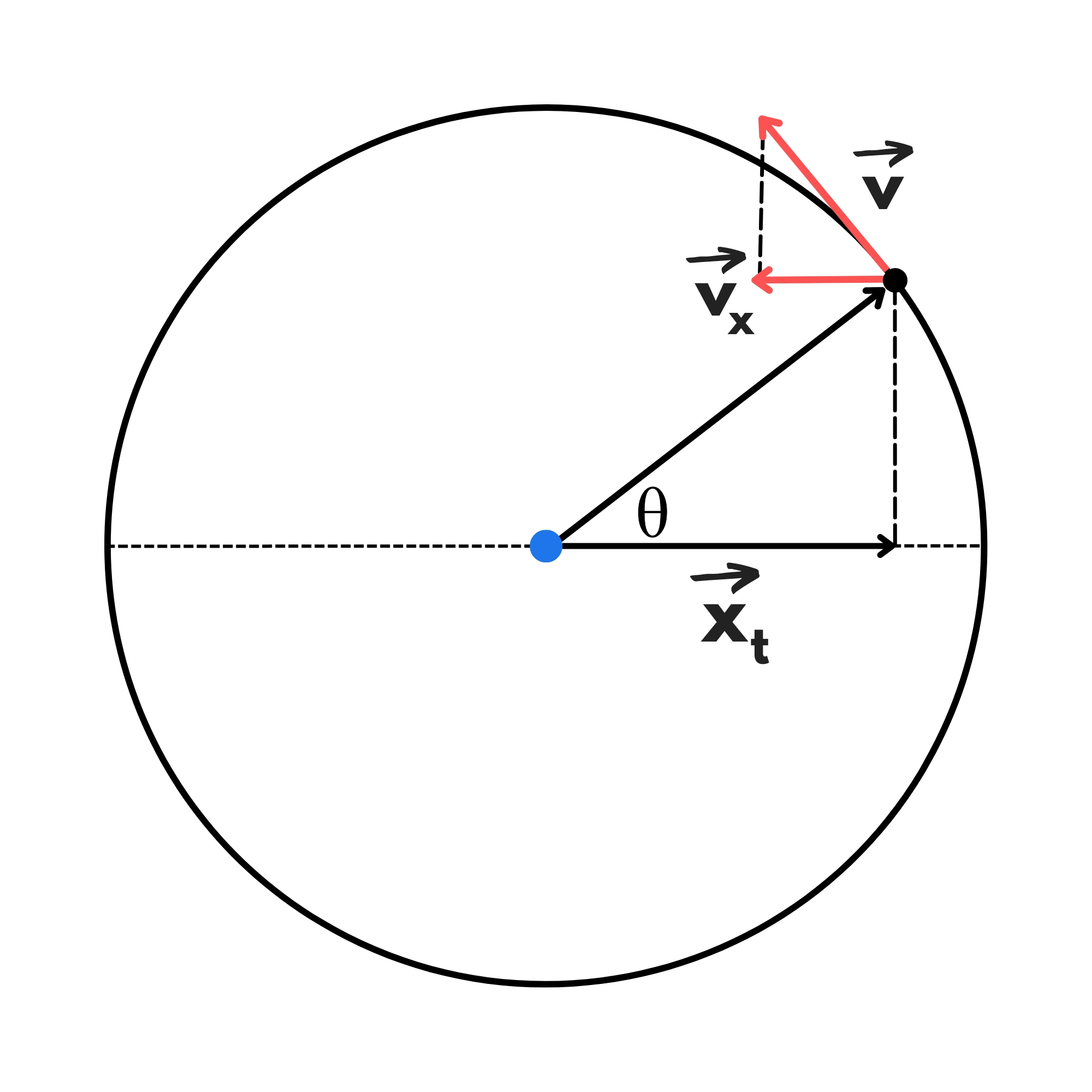
Il moto armonico è il moto effettuato dalla proiezione sul diametro di un corpo che si muove di moto circolare uniforme.
Troviamo per prima cosa la legge oraria:
Ricordiamo innanzitutto che:
e quindi:
Per semplificare consideriamo il caso in cui Isolando otteniamo quindi:
=
Nel moto armonico si chiama fase e si indica con la lettera greca . Lasciamo libero di variare e mettiamo in funzione di .
Sapendo questo, mettiamo l'origine al centro della circonferenza.
Nel moto armonico, chiamiamo il valore del raggio come ampiezza . La velocità angolare la richiamiamo invece pulsazione, ma la lettera rimane la stessa:
Possiamo usare la trigonometria per trovare . Guardando al triangolo rettangolo che si forma con la proiezione, il raggio e la posizione del corpo otteniamo:
Usando la formula che abbiamo trovato prima per otteniamo la formula finale:
Per angoli compresi tra ( ) e ) il loro coseno è negativo e infatti per questi valori il corpo si trova a sinistra dell'origine, avendo perciò una posizione negativa.
Grazie, però, alla formula con , si nota che, come ci si aspettava, per otteniamo:
e per abbiamo:
Ovvero i due estremi del diametro. Inoltre per abbiamo:
Perché infatti si trova all'origine.
Raramente si dimostrano le formula per la velocità e l'accelerazione del moto armonico. Quindi noi forniremo subito la formule e consiglieremo un modo per ricordarle:
La velocità è uguale a:
o usando :
Quando abbiamo la velocità massima? ed restano costanti durante il moto, quindi dobbiamo solo guardare a . Sappiamo che è compreso tra e .
Quindi la velocità massima sarà:
Questo avviene quando perché , ovvero quando il corpo passa per l'origine.
La velocità si annulla invece quando si trova agli estremi del diametro (perché che è infatti quando il corpo cambia direzione.
L'accelerazione è invece uguale a:
o usando :
Quando abbiamo invece l'accelerazione massima? Per lo stesso ragionamento di prima dobbiamo vedere come cambia . Anche è sempre compreso tra e e quindi:
Questa volta però cambia il valore di in cui otteniamo il massimo. Infatti adesso avviene quando (perché ), ovvero quando si trova all'estremo sinistro.
Anche quando si trova all'estremo l'accelerazione vale però con segno opposto perché punta nel verso opposto. Quindi l'accelerazione è massima agli estremi.
Si annulla invece quando passa per l'origine (perché .
Per ricordarvi e formule basta pensare che ogni volta moltiplichiamo per , cambiamo in e cambiamo in .
Come abbiamo anticipato all'inizio della lezione, una massa attaccata all'estremo di una molla, quando compressa o allungata, si muove di moto armonico.
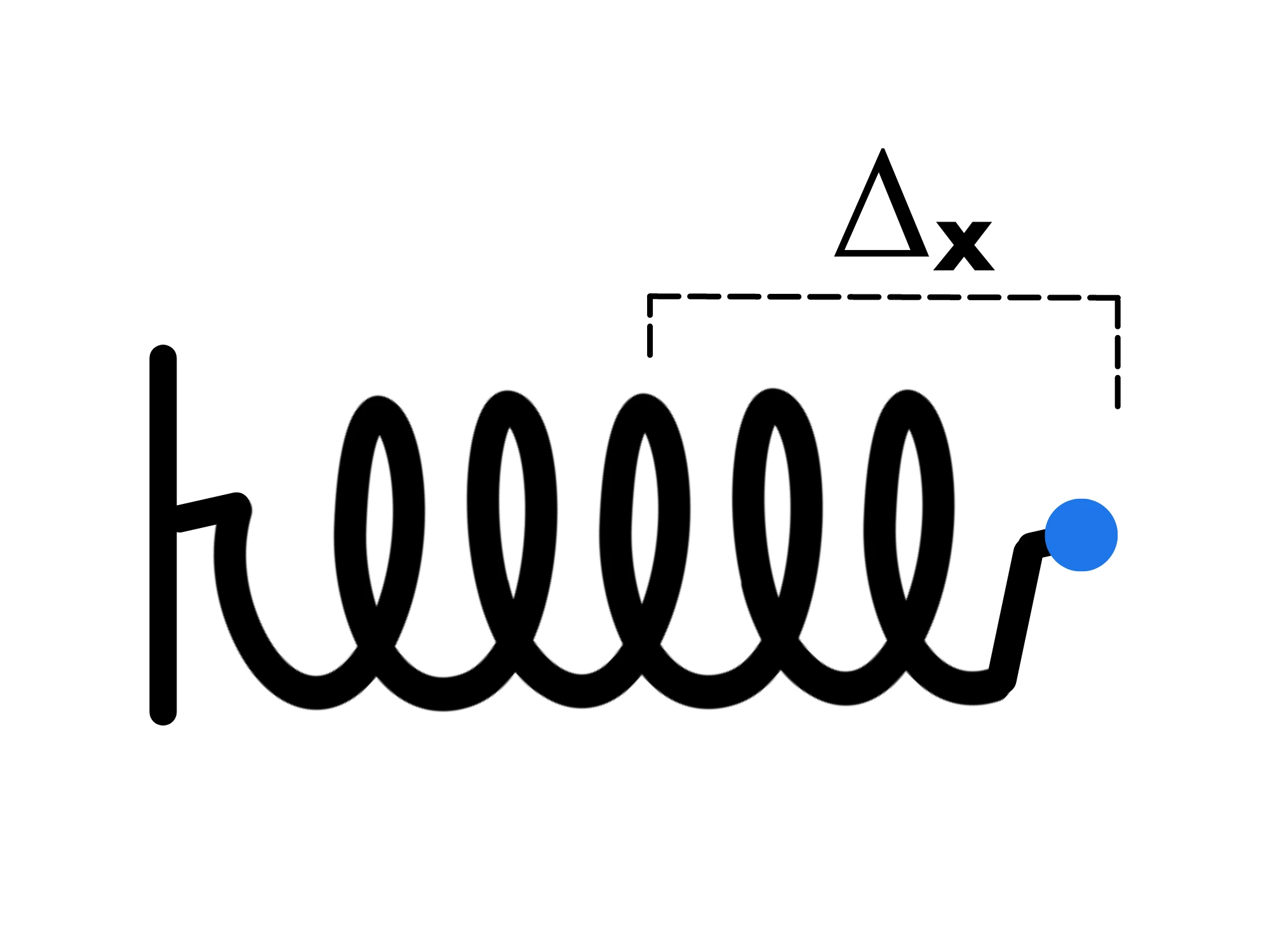
Sapendo solo la costante elastica, la massa e (l'allungamento o compressione della molla) possiamo trovare la legge oraria.
Mettendo infatti l'origine nel punto di stabilità iniziale (dove stava l'estremo prima che venisse compressa) avremo che l'estremo del moto (l'ampiezza) sarà proprio :
è più difficile invece da dimostrare la formula per trovare la pulsazione. Essa è uguale a:
Dove è la costante elastica ed la massa.
Nel caso del moto armonico di una molla, possiamo anche calcolare il periodo, ovvero quanto tempo ci mette ad effettuare un giro completo.
Attenzione, non è uguale al tempo che impiega a tornare due volte sullo stesso punto. Deve tornare due volte sullo stesso punto (se non si trova agli estremi).
Infatti, supponiamo che prima si stia muovendo verso destra. Quando arriva all'estremo e torna indietro, ripassa per il punto, ma questa volta è diretto verso sinistra. Deve quindi prima arrivare all'altro estremo e ritornare di nuovo sullo stesso punto per aver completato un periodo.
Quindi il periodo è il tempo impiegato per passare per entrambi gli estremi e tornare sullo stesso punto.
Questo periodo è uguale a:
Per evitare di confondere le due formule, potete aiutarvi con le unità di misura. La pulsazione si misura in Hz (ovvero ) mentre il periodo si misura in secondi.
Anche il moto di un pendolo si può ricondurre ad un moto armonico. Muovendosi su una circonferenza è più difficile da trovare la legge oraria, ma possiamo calcolare anche per lui il periodo per piccole oscillazione (minori di circa rispetto alla posizione a riposo):
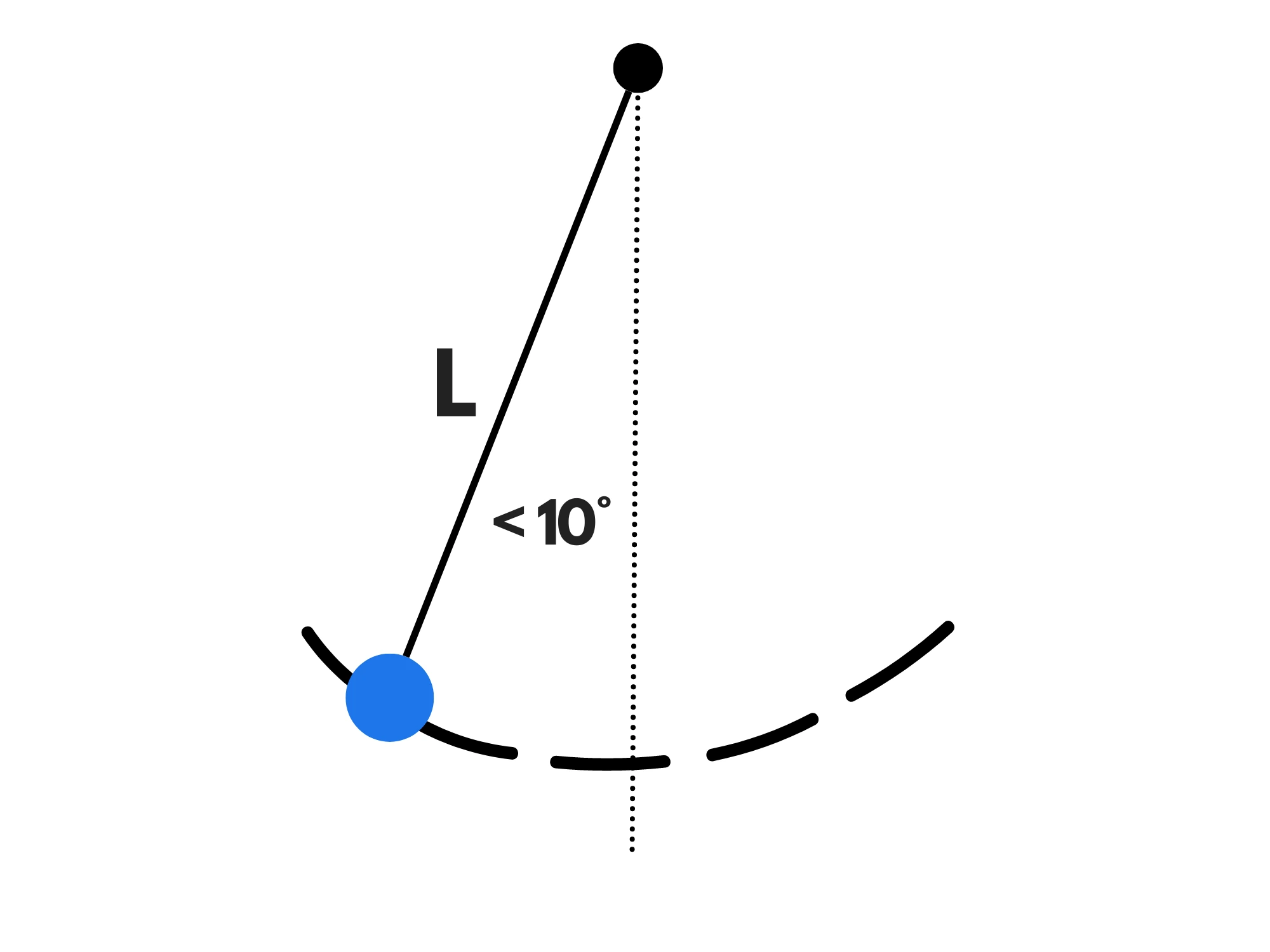
In questo caso il periodo è infatti uguale a: